контроль
 ABS制御
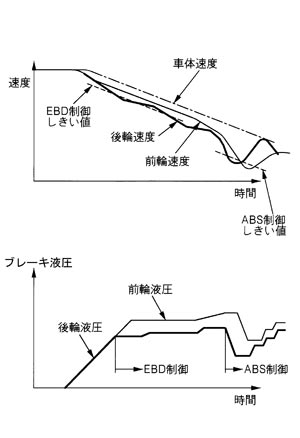
ABS制御制動時、車輪回転センサーから送られてくる矩形波(パルス)信号からC/Uが車輪回転速度、疑似車速を演算し、車輪のスリップ状態に応じた、増圧、保持、減圧信号をアクチュエーターに送り、制動力(ブレーキ液圧)を制御する。
EBD制御制動時、前後輪に発生する微少なスリップをABS車輪回転センサー信号から比較し、後輪側のスリップが前輪側に対し一定以上大きくなった場合、ABSアクチュエーター・C/Uで後輪のブレーキ液圧を制御することで後輪側のスリップ増大を抑制し、前後輪のスリップを均等に近づける。各輪のスリップが更に大きくなり、車輪回転速度がABS制御のしきい値以下になった場合はABS制御を行う。なお、EBDは従来の機械式制動力分配を用いずに、ABSアクチュエーター・C/U内のロジック追加により制動力分配を実現している。