Функция навигации
 位置検出原理
位置検出原理ナビゲーションシステムは、下記の4種類の信号から現在位置を一定周期で計算する。
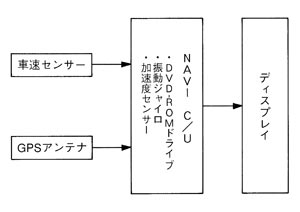
- 車速センサーから求まる車両の移動距離
- ジャイロ(角速度センサー)から求まる車両の旋回角度
- 加速度センサーから求まる車両の傾斜角度、及び高さ変化量
- GPSアンテナ(GPS情報)から求まる車両の進行方向
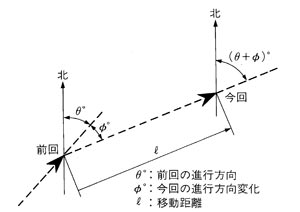
現在の車両位置の計算は、前回に計算が行われた場所からの移動距離及びその間の進行方向の変化を検出し行われる。
- 移動距離車両の移動距離は、車速センサーからの入力信号により計算する。したがって、タイヤの摩耗等により、正しい距離が検出されなくなることを減少させるため、自動距離補正機能を採用している。
- 進行方向車両の進行方向の変化は、ジャイロ(角速度センサー)及びGPSアンテナ(GPS情報)により計算する。この2つには下記のような長所短所がある。
| 種類 | 長所 | 短所 |
| ジャイロ(角速度センサー) | 旋回角度を極めて正確に検出できる。 | 長時間連続走行すると誤差が累積される。 |
| GPSアンテナ(GPS情報) | 車両の進行している方向(東西南北)を検出できる。 | 車速が遅いときは正しい方位を検出できない。 |
状況に応じてこの2つからの信号に優先順位をつけて、より正確な進行方向を検出させている。
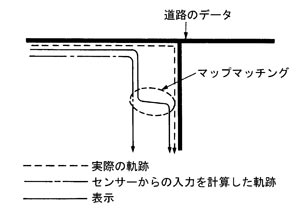
マップマッチングマップマッチングとは、位置検出原理で記述した方法により計算された現在位置をDVD-ROMドライブに格納された地図DVD-ROMから読み込んだ周辺の道路地図データ(注)と比較し、最も正確と推定された道路の上に現在位置を修正する機能である。
参考:
道路地図データは地図DVD-ROMの中のデータを基にしている。下記の場合で、かつGPS情報が受信しにくい状況のときは、しばらく走行しても正しく修正されないことがある。その場合、現在位置マークを手動で修正する必要がある。
- マップマッチングでは、現在走行中と判断して位置修正した道路以外にも、いくつかの道路を順位付けて候補とする。
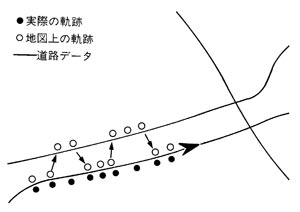
したがって、距離や方位に誤差がある場合は、候補となっている道路の優先順位を誤り、誤った道路へ位置修正することもおこる。また、道路が並走しているような場所では、両方の道路の優先順位がほぼ同じとなり、微妙なハンドル操作や道路形状等により、現在位置マークが両方の道路に交互に表示されることがある。
- 走行している道路が新設等で、地図DVD-ROMに記録されていない場合は、マップマッチングは行えない。また、改修等で表示されている形状と実際の形状が異なる場合も正しいマップマッチングは行えない。
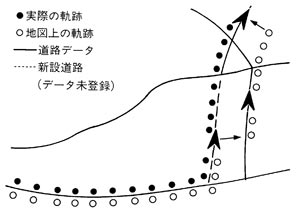
したがって、地図上にない道路を走行すると、現在走行中ではない別の道路にマップマッチングし、現在位置マークがその道路上に表示されてしまうことがある。その後、実際に走行している道路が検出できたときには、その道路上に現在位置マークが跳ぶことがある。
- 距離と方位により計算された位置・進行方向と、地図DVD-ROMから読み込んだ道路データを比較できる範囲は限られているため、ある程度以上現在位置がずれた場合、マップマッチングでは正しい位置に修正できない。
GPS(Global Positioning System)GPSは、米国国防総省が開発、運用している全世界測位システムのことで、GPS衛星(NAVSTAR)が、高度約21,000 kmの円軌道で地球を周回しながら電波を発信している。
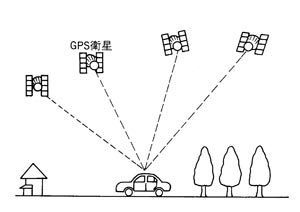
GPS受信機は、4つ以上のGPS衛星から到着する電波の時間差により、車両の3次元の位置(緯度、経度、高度)を計算する(3次元測位)。GPS衛星からの電波が3つしか受信できないときは4つのGPS衛星を使って求めたときの高度データを用いて2次元の位置(緯度、経度)を計算する(2次元測位)。
なお、車両が停止しているときはGPSによる位置修正は行われない。
下記の場合はGPSは精度が悪くなる。
- 2次元測位では、車両位置の高度が変化すると精度が劣化する。
- 精度は測位に利用したGPS衛星の配置の影響を受けるため、GPS衛星の配置によっては位置検出性能は低下する。
- トンネル内、ビル内の駐車場、高速道路の高架下等、GPS衛星からの電波が受信できない場合、位置検出ができない。また、GPS用のアンテナの上に物を置くと、GPS衛星からの電波が受信できないことがある。
参考:
- 位置検出性能は、精度の高い3次元測位でも10 m程度の誤差がある。
- GPS衛星は、米国の追跡管理センターによって信号をコントロールされているため、意図的に精度が落ちたり、電波が止ってしまうことがある。