Монитор заднего вида, функция бокового слепого монитора
 作動説明
作動説明- セレクトレバーをRレンジにすると、ディスプレイにバックビューモニター映像を映し出す。“SIDE BLIND”スイッチを押すと、ディスプレイにサイドブラインドモニター映像を映し出す。
- バックビューモニター映像時に“SIDE BLIND”スイッチを押すと、サイドブラインドモニター映像に切り替わる。再度“SIDE BLIND”スイッチを押すと、バックビューモニター映像に切り替わる。
- “SIDE BLIND”スイッチを押すと、その押したときから3分間サイドブラインドモニターのタイマーが作動する。
- サイドブラインドモニターのタイマーが作動中に、セレクトレバーをRレンジにしてバックビューモニター映像に切り替え、その後セレクトレバーをRレンジ以外にしたときは、ディスプレイにはサイドブラインドモニター映像が映し出される。サイドブラインドモニターのタイマーが作動中に他の画面へ遷移したいときは、オーディオユニットのスイッチを操作して行う。
- サイドブラインドモニター映像時に“SIDE BLIND”スイッチを押すと、その押したときから3分間タイマーが作動する。タイマーが終了すると自動的に元の映像に戻る。また、セレクトレバーがRレンジのときは3分間経過してもサイドブラインドモニターのタイマーはOFFにならない。
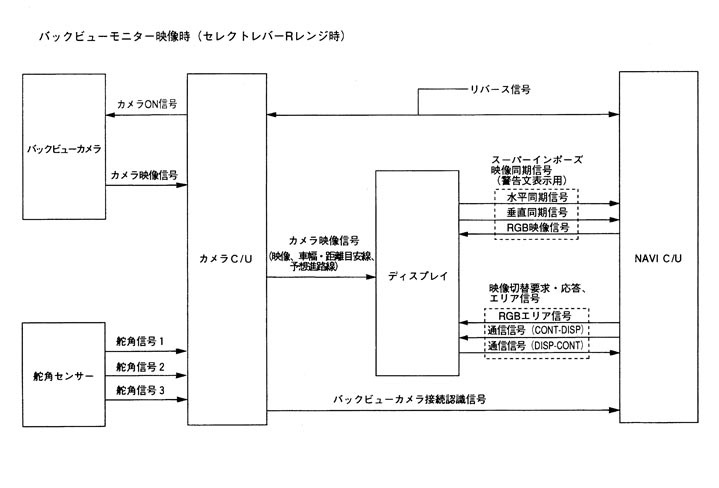
カメラ映像作動原理 バックビューモニター
バックビューモニター- セレクトレバーをRレンジにし、カメラC/Uにリバース信号が入力すると、カメラC/UからバックビューカメラへカメラON信号が送られ、バックビューカメラはカメラC/Uにカメラ映像を出力する。
- カメラC/Uはバックビューカメラからの映像に車幅・距離目安線及び予想進路線を合成し、バックビューカメラ映像信号をディスプレイに送信する。このときNAVI C/Uにもリバース信号が入力するため、NAVI C/UはセレクトレバーがRレンジと認識し、NAVI C/Uとディスプレイ間の通信信号、RGBエリア信号によってディスプレイに映し出す映像をバックビューカメラ映像に切り替える。
- NAVI C/Uはバックビューカメラ接続認識信号の有無によって、バックビューカメラが車両に装備されているかの判別をしており、装備されている場合はリバース信号入力時にバックビューカメラ映像への切り替えを行う。
- バックビューカメラ映像時に表示する警告文は、NAVI C/Uで描画している。
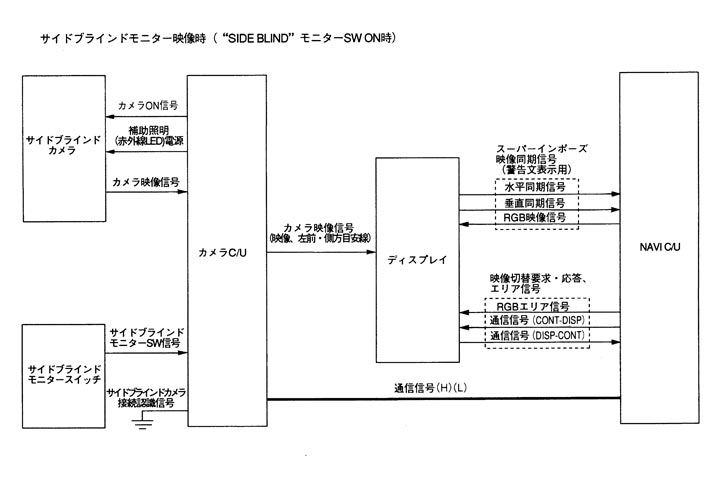
サイドブラインドモニター- “SIDE BLIND”スイッチを押し、カメラC/UにサイドブラインドモニターSW信号が入力すると、カメラC/UからサイドブラインドカメラへカメラON信号が送られ、サイドブラインドカメラはカメラC/Uにカメラ映像信号を出力する。
- カメラC/Uはサイドブラインドカメラからの映像に左前・側方目安線を合成し、サイドブラインドカメラ映像信号をディスプレイに送信する。このときNAVI C/Uとディスプレイ間の通信信号、RGBエリア信号によってディスプレイに映し出す映像をサイドブラインドカメラ映像に切り替える。
- カメラC/Uはサイドブラインドカメラ接続認識信号の有無によって、車両に装備されているかの判別をしており、装備されている場合はサイドブラインドモニターSW信号入力時にサイドブラインドカメラへの切り替えを行う。
- “SIDE BLIND”スイッチON時には、補助照明(赤外線LED)にも供給し、補助照明を点灯する。
- “SIDE BLIND”スイッチをONにすると3分間タイマーが作動し、タイマー作動中はカメラC/Uからサイドブラインドカメラ及び補助照明(赤外線LED)に電源を供給し続ける。
- サイドブラインドカメラ映像時に表示する警告文は、NAVI C/Uで描画している。
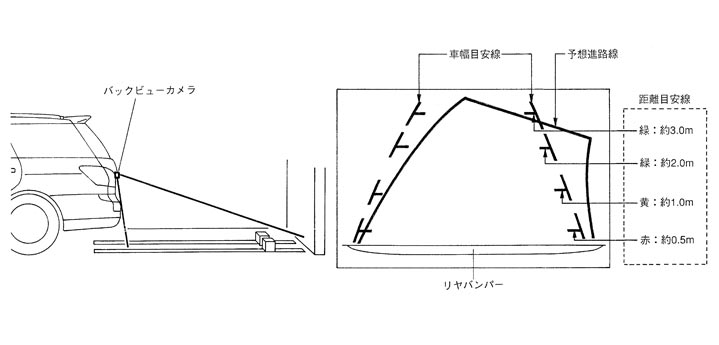
バックビューモニター表示時の車幅・距離目安線及び予想進路線表示機能- バックビューモニター表示時に、車幅・距離目安線及びステアリング切れ角に応じた車両の進路を示す予想進路線を表示することで、車両と車両後方の物体との距離感や車幅感覚をつかみやすくし、後退駐車時の補助をする。
- ステアリングの操舵方向及び操舵角に応じた信号を、舵角センサーからカメラC/Uに出力し、カメラC/Uはその信号に基づき予想進路線を描画する。
- 予想進路線が表示しているときは、車幅・距離目安線は半透明に表示される。
- ステアリングが中立位置のときは、予想進路線は表示されない。
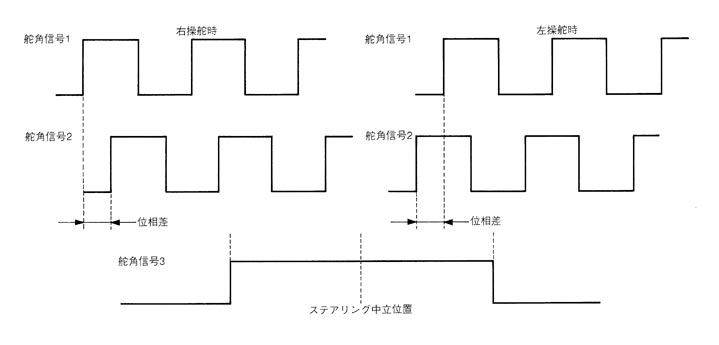
バックビューモニター予想進路線作動原理 ステアリング回転方向検出カメラC/Uは、舵角信号1及び舵角信号2から入力する2組のパルス信号の位相差によって、ステアリングの回転方向を検出している。
ステアリング中立位置検出舵角信号3はステアリング転舵1回転で1パルス発生し、それによりカメラC/Uはステアリング中立位置を検出している。
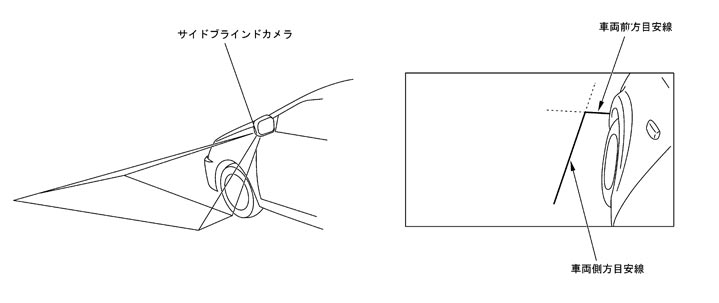
 サイドブラインドモニター時の目安線表示機能
サイドブラインドモニター時の目安線表示機能車両左前方映像に目安線を合成し、車両と車両左前方の物体との距離感をつかみやすくした。