Обзор системы
 機能概要
機能概要- キースイッチON、ライトSWが2段のときに、乗員数や積載量の変化に伴う光軸の上下方向へのずれを自動的に補正するヘッドランプオートレベライザーを採用した。
システム図 作動説明
作動説明ハイトセンサーはセンサーレバー角度からリヤの車高変化を検出し、ヘッドランプ光軸の適正な高さへの補正値をレベライザー駆動信号としてヘッドランプレベライザーに出力する。ヘッドランプレベライザーはヘッドランプをレベライザー駆動信号に見合った量、上下方向にレべリング作動させる。
車両姿勢安定状態のリヤの車高が空車状態より低い時は、ヘッドランプの光軸が基準位置(機械的エーミング調整位置)より相対的に高くなる。その変化量を相殺する補正として、レベリング作動を行い対向車等への眩惑を発生させないように制御する。
リヤの車高に対してフロントの車高が低い場合は、基準位置より相対的に光軸が下がるが、基準位置をレベリング作動上端とし、基準位置より光軸が上がるレべリング作動は行わない。
 レべリング作動(スタティック方式)
レべリング作動(スタティック方式)ハイトセンサーはキースイッチONの間レベライザー駆動信号を出力する。ヘッドランプの光軸を変化させる時にレベライザー駆動信号の出力変化を行い、それ以外の状態の時は出力を保持する。
- キースイッチOFF→ON時作動IGN電源が入力した時点のリヤの車高を基準にレべリング作動を行う。
- 停車時作動ライトスイッチが2段の停車時は、リヤの車高が約10秒間保持されるとその約5秒後にレベリング作動を行う。
- 走行時作動ライトスイッチが2段の定速走行時は、一定時間毎のリヤの車高に応じてレベリング作動を行う。
| スタティック方式 | :車両姿勢安定状態の車高(ピッチ角)を基準に光軸を制御する方式。加減速などのダイナミックな車高(ピッチ角)の変化に対する制御は行わない。 |
作動範囲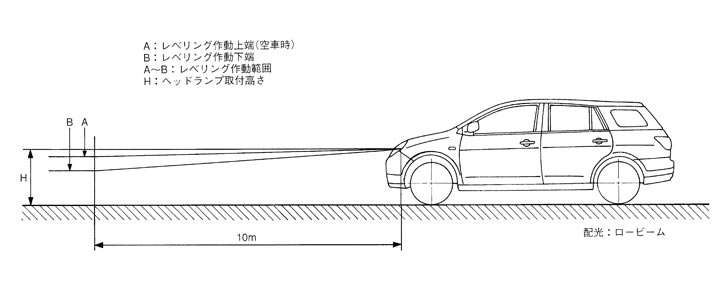
| 10m先での光軸参考変化量 | 2WD車 | 4WD車 | 車両状態 |
| レべリング作動上端(基準位置) | 0mm | 0mm | 空車時(乗員0人) |
| レべリング作動下端 | 約350mm | 約250mm | リヤ車高低 |
参考:
実際の制御ではリヤの車高変化に対して相対的に光軸が基準位置(機械的エーミング調整位置)からの変化を相殺する制御を行う。10m先の配光で基準位置から光軸が上側約50mm~下側約50mmの範囲内に光軸を制御する。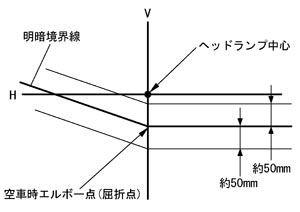
■ 注意 ■
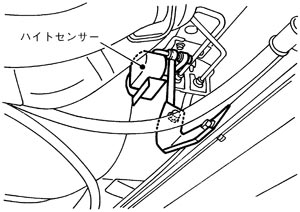
足回りの変更、経時変化によるサスペンションの変化等の影響により、ヘッドランプオートレベライザーの機能が正常でも補正後の光軸位置と基準位置に差が発生する場合がある。 構成部品取付位置 システム構成部品機能 ハイトセンサー
システム構成部品機能 ハイトセンサーハイトセンサーは、センサーレバー角度でリヤサスペンションビームの変位を車高の変化として検出し、また入力される各状態信号から車両状態を判断し、ヘッドランプ光軸高さの補正値をレベライザー駆動信号としてヘッドランプレベライザーに出力する。
- センサーレバー角度検出可能範囲センサーレバー角度は、A~Cの範囲内で検出できる。

2WD 4WD リヤ車高 A 約0度 約0度 低い B 約45度 約35度 空車 C 約65度 約60度 高い
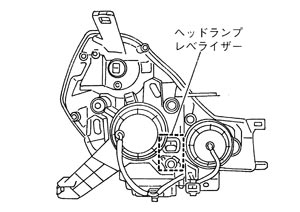
 ヘッドランプレベライザー
ヘッドランプレベライザーハイトセンサーが出力するレベライザー駆動信号に応じて、内部モーターに電圧を供給してヘッドランプのリフレクターを上下方向にレベリング作動させる。
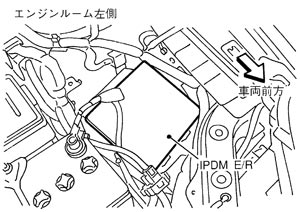
 IPDM E/R
IPDM E/RBCMからCAN通信で受信するヘッドランプリクエスト信号(LO)に応じてハイトセンサー、およびヘッドランプレベライザー(左右)にヘッドランプ信号(LO)を出力する。
 コンビネーションメーター
コンビネーションメーター車両速度を8パルスの車速信号に変換してハイトセンサーに出力する。