система контроля холостого хода
 概要
概要エアコン負荷、電気負荷、エンジンの暖機状態などの運転条件に応じて、電子制御スロットルで吸入空気量を制御し、アイドル回転数を目標値にフィードバック制御します。
システム及び作動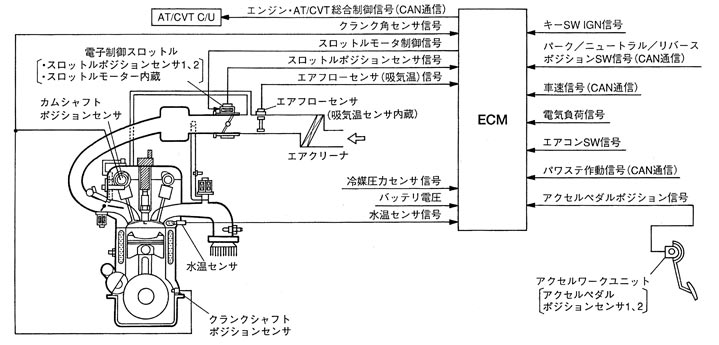
|
主な入力信号 |
主な制御内容 |
|
|
クランクシャフトポジションセンサ信号 |
|
|
|
水温センサ信号 |
|
|
|
スロットルポジションセンサ信号 アクセルペダルポジションセンサ信号 |
|
|
|
車速信号 |
(CAN通信) |
|
|
パーク/ニュートラルポジションSW信号 |
|
|
|
リバースSW信号 |
(CAN通信) |
|
|
エアコンSW信号 |
(CAN通信) |
|
|
パワステ作動信号 |
(CAN通信) |
|
|
電気負荷SW信号 |
(CAN通信) |
|
|
ブロアファンSW信号 |
(CAN通信) |
|
|
冷媒圧力センサ信号 |
|
|
|
バッテリ電圧 |
|
|
 電子制御スロットルの制御 アイドル回転数フィードバック制御
電子制御スロットルの制御 アイドル回転数フィードバック制御制御目標値を冷却水温、ギヤ位置などにより定め、アイドル判定時、かつパーク/ニュートラルポジションスイッチON又は低車速時に目標値になるようフィードバック制御します。
なお、アイドル回転数調整はECMによる学習方式(アイドル吸入空気量学習)としました。
アイドル回転数又は点火時期が基準値から外れている場合は「アイドル吸入空気量学習」を行う必要があります。
学習要領は整備要領書 EC編「スロットル全閉位置学習及びアイドル吸入空気量学習」の項を参照ください。
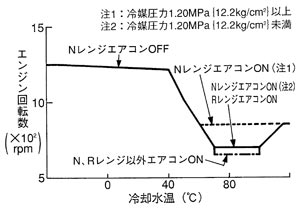
アイドル回転数フィードバック制御目標値水温、エアコン、ギア位置等により、制御目標値(目安)は以下のようになります。
ただし、始動直後は若干の補正を加え回転数を上げてアイドル安定性を高めています。
 バッテリ電圧補正
バッテリ電圧補正バッテリ電圧が定格以下の状態になると、目標値を補正してバッテリ充電を促進させます。
各種補正制御- 各種負荷(パワーステアリング、電気負荷、ブロアファン等)ON時はそれぞれの目標回転数に制御します。
- A/Tシフト位置切り替え(N→D、D→N等)時、スロットル開度を最適にしてショックを低減する回転数に制御します。
- 減速時(アクセルON→OFF)、ショック緩和及び排出ガス低減のためスロットル開度を最適に制御します。