Представьте: пока мы на Земле маневрируем между ямами и грузовиками, японские инженеры уже осваивают лунный рельеф. Panasonic Advanced Technology и Mitsubishi Heavy Industries объединили силы, чтобы создать систему безопасного вождения LUNADAS для лунного ровера. Это не просто гаджет для космического сафари — это шаг к тому, чтобы роботы не кувыркались в кратерах, как пьяные джипы на бездорожье. Проект вписывается в амбициозную миссию LUPEX, где JAXA и индийская ISRO охотятся за водой на южном полюсе Луны.
LUPEX — это не какая-то лунная прогулка, а серьезный квест за ресурсами. Запуск намечен на H3-ракете от JAXA, а ровер будет рыскать по поверхности, буря почву и анализируя, где и сколько там льда. Индия отвечает за посадочный модуль, а Япония — за самого "водителя". Ровер, управляемый с Земли, должен уклоняться от камней, кратеров и прочей лунной романтики, не давая операторам уснуть за пультом. Ведь на Луне нет ни пробок, ни светофоров, но риски те же: засада в песке или кульбит в яму — и миссия накрылась.
От земных внедорожников к лунным гонкам
Чтобы понять, насколько это круто, вернемся в историю. Первыми на лунном бездорожье покатались советские Луноходы в 1970-х: Lunokhod-1, тот самый "лунный луноход", проехал 10 километров по Морю Дождей, управляемый из Крыма. Он был примитивным — камеры, антенны и восемь колес, но доказал, что роботы могут ездить по Луне лучше, чем астронавты на Apollo. Американцы потом подхватили эстафету с Mars Pathfinder и Curiosity, где колеса уже грызли марсианский реголит. Но Луна — это другой уровень: низкая гравитация, радиация и вечная тьма в полярных кратерах, где, по данным NASA, прячется вода.
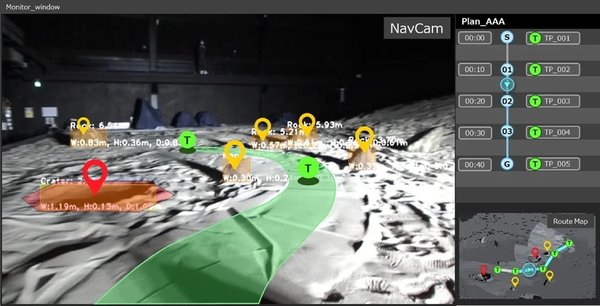
Японцы, мастера точности, берут лучшее от земных технологий. LUNADAS использует стереокамеры для сканирования рельефа, AI распознает препятствия, а 3D-карты строятся на лету. Добавьте симулятор на базе Unity и AGX Dynamics — и вуаля, виртуальная Луна с песком, который липнет к колесам, как сибирская грязь к УАЗу. Они даже моделируют солнечный свет под углом, чтобы ровер не слеп от теней. Ирония в том, что пока Tesla Autopilot борется с городскими ямами, эти ребята симулируют лунные оползни. А soil parameters? Неизвестны, так что трение колес — переменная величина, как погода в Лондоне.
Разработка опирается на опыт JAXA в наземных тестах: в их "космическом поле" в Цукубе ровер катается по искусственной Луне с лампами, имитирующими полярный сумрак. Здесь проверяют, как AI видит камни в полумраке и строит карты без ошибок. Это не просто код — это融合 земного оффроуда и космической инженерии. Panasonic, известный батареями для электрокаров, теперь заряжает роботов для межпланетных вылазок, а Mitsubishi Heavy, строящий ракеты, добавляет динамику полета... на колесах.
Будущее на четырех колесах
В итоге, LUNADAS снизит нагрузку на операторов: меньше стресса, больше фокуса на науке. Представьте, как ровер сам объезжает кратер, пока земляне пьют кофе. Это шаг к автономным миссиям, где роботы не ждут команды через 1,3 секунды задержки. Япония и Индия уже тестируют прототипы, и к запуску в 2025-м (или позже, космос любит задержки) мы увидим, как лунный "джип" ищет воду для будущих баз.
Иронично, но пока электромобили на Земле учатся парковаться, лунные роверы осваивают галактику. Может, скоро и наши кроссоверы получат "лунный режим" для зимних дорог? Шутки шутками, но эта разработка — мост между автопромом и космосом. Следите за обновлениями: Луна ближе, чем кажется.