Органы управления и функции
 コンビネーションスイッチ読み取り機能
コンビネーションスイッチ読み取り機能 概要
概要- BCMは、コンビネーションスイッチ(ライトスイッチ、ワイパースイッチ)の状態を読み取り、その結果に基づいて、ヘッドランプ、ワイパーなど関連システムの制御を行う。
- BCMは、5つの出力端子(OUTPUT 1~5)と5つの入力端子(INPUT 1~5)の組み合わせで、最大20種類のスイッチ情報を読み取る。
作動説明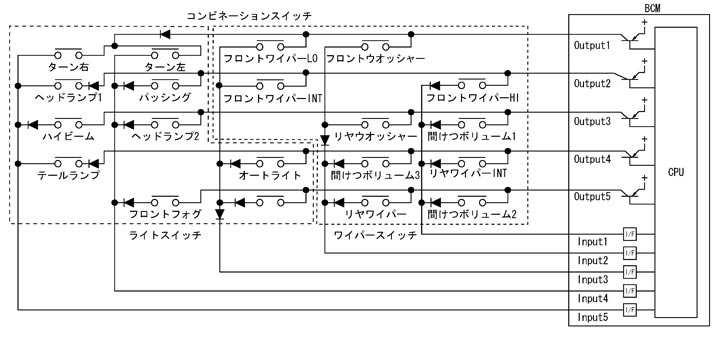
- BCMは、一定周期で出力端子(OUTPUT 1~5)のトランジスタを作動させて順番に電流を流す。
- いずれか(または複数)のスイッチをONにすると、出力端子(OUTPUT 1~5)と入力端子(INPUT 1~5)間に回路が成立する。
- このとき、出力端子(OUTPUT 1~5)のトランジスタが作動し電流が流れ、そのスイッチに対応する入力端子(INPUT 1~5)の電圧が変化すると、BCM内のインターフェースがその状態を検出して、BCMは、該当するスイッチがONと判断する。
BCM-コンビネーションスイッチ作動表- BCMは、下表の組み合わせでコンビネーションスイッチの作動状態を読み取る。
 参考:ヘッドランプは、2系統のスイッチを設定している。
参考:ヘッドランプは、2系統のスイッチを設定している。
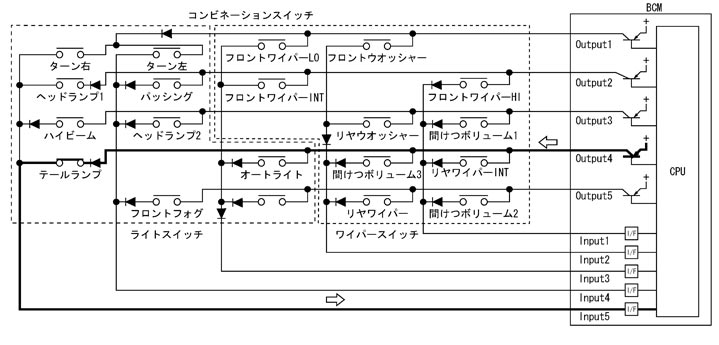
作動例・・・(テールランプスイッチをONにした場合)- テールランプスイッチ(ライトスイッチ1段)をONにすると、コンビネーションスイッチ内の接点がONになる。このとき、OUTPUT 4のトランジスタが作動すると、INPUT 5で電圧が変化したことを検出する。
- BCMは、OUTPUT 4のトランジスタがONのとき、INPUT 5で電圧が変化したことを検出すると、テールランプ スイッチがONであると判断し、CAN通信で、IPDM E/Rにテールランプリクエスト信号(ON)を送信する。
- BCMは、再度OUTPUT 4のトランジスタを作動させたとき、INPUT 5で電圧が変化したことを検出すると、テールランプスイッチのON状態が継続していることを認識する。
 参考:各OUTPUT端子のトランジスタは、10ms間隔で作動する。従って、スイッチをONにしてからその電気負荷が作動するまでに遅れが生じるが、その遅れは、人間の感覚では認識できない位の微小な時間である。
参考:各OUTPUT端子のトランジスタは、10ms間隔で作動する。従って、スイッチをONにしてからその電気負荷が作動するまでに遅れが生じるが、その遅れは、人間の感覚では認識できない位の微小な時間である。
フロントワイパーボリューム設定(フロントワイパー間けつ作動)BCMは、コンビネーションスイッチの間けつボリューム1、2、および3の3つのスイッチの状態から、ワイパーボリューム位置(1~7)を判断する。
ワイパーボリューム位置 間けつ休止時間 コンビネーションスイッチ 間けつボリューム1 間けつボリューム2 間けつボリューム3 ワイパーボリューム1 短
↑
↓
長ON ON ON ワイパーボリューム2 ON ON OFF ワイパーボリューム3 ON OFF OFF ワイパーボリューム4 OFF OFF OFF ワイパーボリューム5 OFF OFF ON ワイパーボリューム6 OFF ON ON ワイパーボリューム7 OFF ON OFF
- 例)ワイパーボリューム1の場合コンビネーションスイッチの読み取り機能により、間けつボリューム1、2、および3のON、OFF状態をBCMは検出する。BCMは、コンビネーションスイッチが下記の状態のときに、ワイパーボリューム1と判断する。
- 間けつボリューム1:ON(OUTPUT3とINPUT1が導通)
- 間けつボリューム2:ON(OUTPUT5とINPUT1が導通)
- 間けつボリューム3:ON(OUTPUT4とINPUT2が導通)
作動モードコンビネーションスイッチ読み取り機能には、下記の作動モードがある。
- 通常時
- BCMがスリープ状態以外の時、OUTPUT(1~5)の端子はそれぞれ10msごとにON‐OFF作動する。
- スリープ状態時
- BCMがスリープ状態の時、OUTPUT 1~5は60msごとにON‐OFF作動し、低消費電力モードになる。このとき、ライトスイッチ系(ターンスイッチ以外)の入力のみ受け付ける。

 CAN通信制御
CAN通信制御CAN通信では、それぞれのコントロールユニットを2本の通信線(CAN L線、CAN H線)でつなぐことにより、多くの情報を、少ない配線で通信することが可能である。また、各コントロールユニットは、それぞれデータの送受信を行い、必要な情報だけを読み取る。
CAN通信信号一覧CAN通信接続ユニット
を参照。
BCMの状態制御BCMは、無駄な電力を消費しないようにするため、そのときの作動状態によって、自らの状態を切り替える。
- 1.CAN通信状態
- キースイッチONの状態で、他のコントロールユニットと、CAN通信が正常に行われている状態である。
- BCMで行う各制御が、正常に行われている状態である。
- キースイッチがOFFの場合は、スリープ状態に移行できる。
- キースイッチOFFの状態でも、IPDM E/R、コンビネーションメーター、およびインテリジェントキーユニットいずれかとのCAN通信が成立している場合は、CAN通信状態となる。
- 2.スリープ移行状態
- キースイッチOFFで、CAN通信を停止させるための処理を行う状態である。
- IPDM E/R、コンビネーションメーター、およびインテリジェントキーユニットにスリープリクエスト信号を送信する。
- 全コントロールユニットの、CAN通信が停止して2秒経過すると、CAN通信停止状態へ移行する。
- 3.CAN通信停止状態
- キースイッチOFFで、CAN通信が停止している状態である。
- キースイッチOFFで、BCMのみで行う制御が、作動している場合の状態である。
- 全コントロールユニットの、CAN通信が停止して3秒経過すると、スリープ状態へ移行する。
- 4.スリープ状態
- BCMは、低消費電力モードで作動している状態である。
- CAN通信は、停止している状態である。
- CAN通信の信号変化を検出すると、CAN通信状態へ移行する。
- 下記スイッチの状態が変化すると、CAN通信状態へ移行する。
- キースイッチ(ACC、ON)
- プッシュスイッチ
- ハザードスイッチ
- 集中ドアロックスイッチ
- 運転席ドアスイッチ
- 助手席ドアスイッチ
- 後席右ドアスイッチ
- 後席左ドアスイッチ
- バックドアスイッチ
- コンビネーションスイッチ(パッシング、ライトスイッチ1段)
- リモコン(ロック、アンロック信号)
- 運転席ドアロック状態検出スイッチ
- キー差し込み検出スイッチ
- BCMのみで行う制御が、スイッチにより要求された場合は、CAN通信停止状態へ移行して、作動を行う。